
Alex Agizim is CTO of Automotive and Embedded Systems at EPAM.
The autonomous car will redefine how we travel, ship inventory, and design infrastructure. As physical objects become more deeply integrated into the Internet of Things, the connected car will soon become an essential component of the IoT ecosystem.
An important element as we look towards actually implementing the autonomous car is understanding how mission-critical safety software and the Internet of Cars will operate within the car ecosystem. This is a blog that tries to explain what is happening currently; the importance of creating a security-first approach with open source software; and how we at EPAM are approach and solving some of the common problems.
If you are interested in learning more about this, Alex will be at the Automotive Linux Summit happening in Tokyo from May 31 – June 2. His talk will be all about the cloud connected vehicle based on open source software. Linux.com readers get to save 5% off the “attendee” pass to Automotive Linux Summit. Register now with code LINUXRD5.
What is the current problem?
The Internet of Cars ecosystem and shared economy model require the vehicle to become part of the Cloud. Service vendors should own the end-to-end service software stack including the part of the software executed in the vehicle. The deployment, upgrades and development of the in-vehicle part of the service should be completely independent from the Car OEM development lifecycle.
Currently, service vendors don’t have the ability to update or deploy the in-vehicle part of the software. It can only be done by the Car OEM that owns the complete software that runs on onboard computers.
Protecting Your Vehicle on the Cloud
No matter which solution will be used for cloud integration, it still opens the system for potential intrusions through the exploitation of connection vulnerabilities. Thus, some level of isolation from the rest of the safety-critical software is needed. Here is how we envision the Xen hypervisor-based solution for isolation of different subsystems (soft ADAS & cluster, HMI, cloud apps):
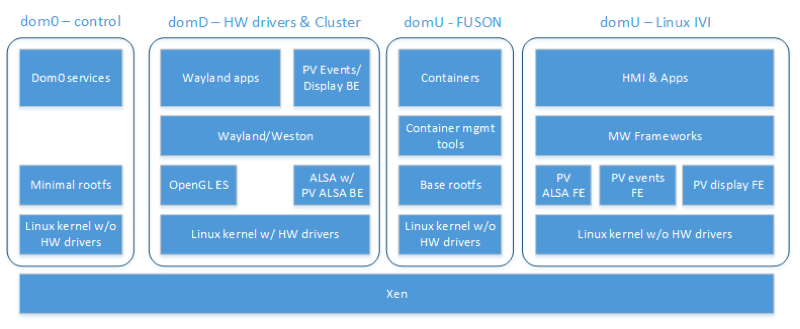
This infrastructure (including containers and Docker to deploy service software with the same approach as regular cloud-based services to the EPAM Fusion domain) allows service vendors to develop and deploy services without any special knowledge of embedded/automotive software. The domain provided by the Car OEM would ensure the full control of APIs and policies that might be used by the service. The domain would not have access to the hardware because of hardware virtualization isolation.
The autonomous car is slowly upon us, but there are many challenges that lie ahead, especially when it comes to critical software functions on the cloud. The way the technology industry approaches this will be imperative to innovation.
If you are curious to learn more about EPAM Fusion, see our demo video below:



{kind=link}